新闻中心
发那科机器人中Space fnct的实际应用和设置介绍
类别:新闻中心日期:2019-12-06 15:10:22
发那科机器人设置中干涉区功能(Space fnct)设置,此功能适用于机器人与外围设备联合工作时,不会因为信号被误操作发送后造成机器人还在外围设备的工作范围内,外围设备被启动后造成设备的损坏。
1实用范围
机器人运用于机床、注塑机或其他设备取放件和工艺加工时,都以保护各方设备安全的前提下进行生产,合理的设置干涉区功能并激活后,可以提高机器人和加工设备间联动作业时的安全性能。
2设置机器人的干涉区
以机器人和加工中心上下料为例,说明干涉区的设置步骤。
2.1设置步骤
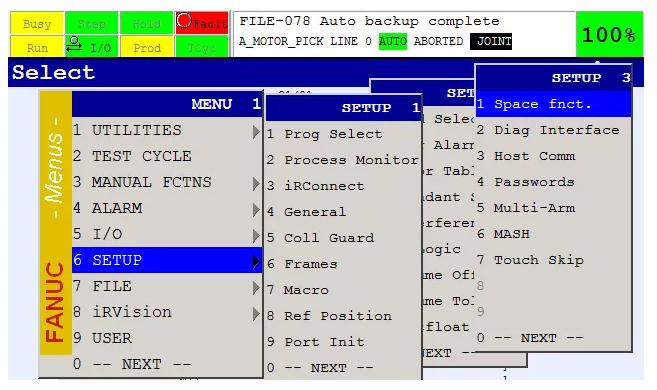
示教器上点击“MENU”→“SETUP”→“Space fnct”,进入干涉区画面。
图1 干涉区选项
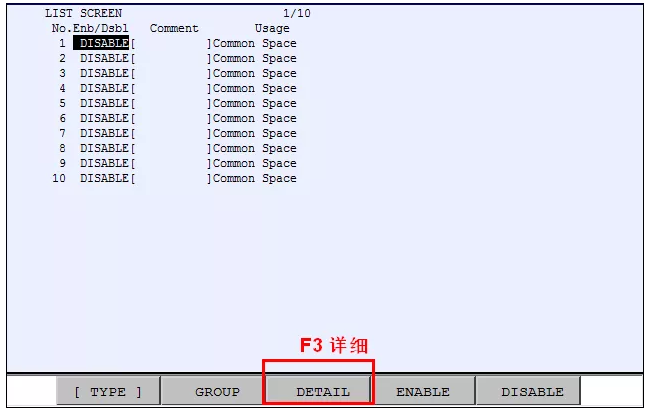
选择未被使用的干涉区,按下示教器“F3 DETAIL”,进入干涉区设置画面
图2 干涉区画面
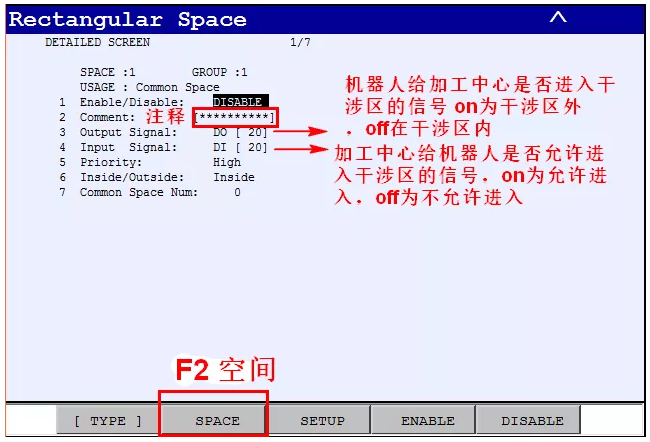
在干涉区设置画面里,填入注释,相关的输入输出信号,按下“F2 空间”
图3 干涉区设置画面
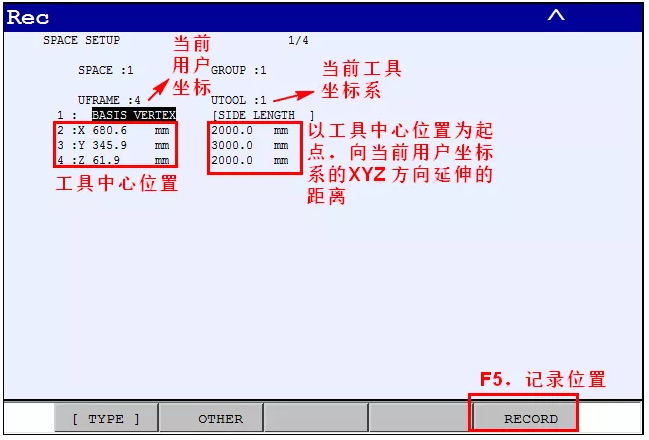
进入干涉区空间设置画面,将机器人运动到合适的干涉区起点,“SHIFT+F5 RECORD”记录下当前的工具坐标中心,以当前工具中心为起点,填入当前的用户坐标系的XYZ方向延伸的距离,形成一个空间。
图4 干涉区空间设置画面
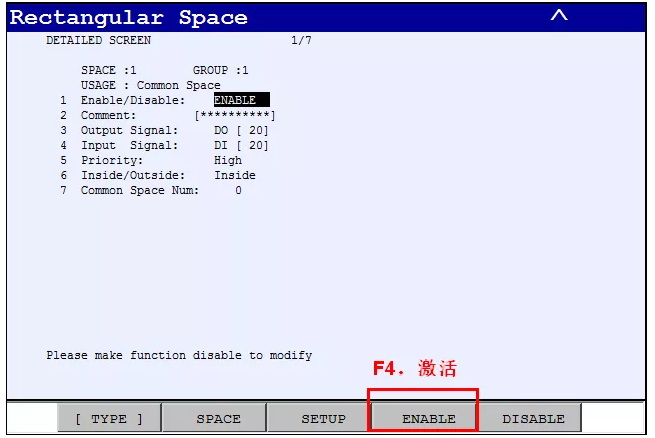
按下“prev”返回干涉区设置画面,按下“F4 激活”,激活当前干涉区,完成设置。
图5 干涉区激活设置画面
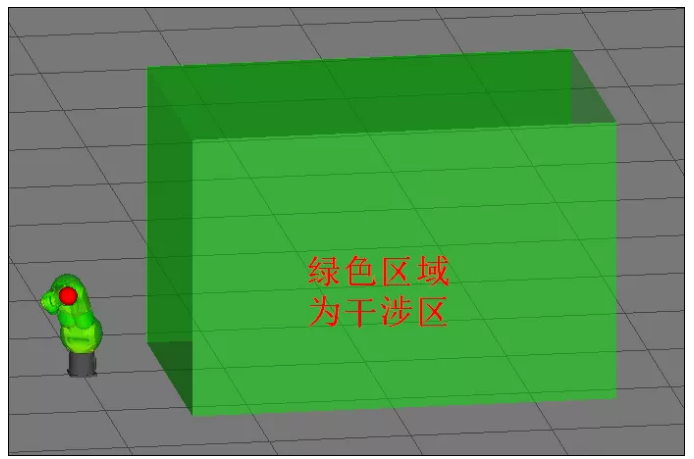
图6 干涉区模拟画面
2.2 注意事项
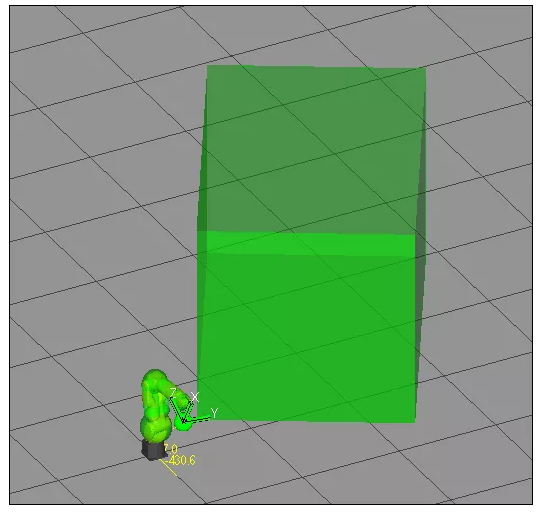
加工中心落位和机器人的世界坐标不平行,呈一定的角度时,可以做好加工中心的用户坐标后在设置干涉区的空间,此时干涉区空间和机器人也可以呈现一定角度。
图7干涉区模拟图
3 功能总结
设置干涉区时,需要明确当前的工具中心和运行程序中的工具中心,如果以法兰中心为工具中心,则需要留出手抓长度和设备之间的距离,避免法兰中心在干涉区外,而法兰上的手抓已经进入干涉区,造成碰撞。在正常的情况下,机器人输出的干涉区信号开和关完全由工具中心位置来决定,不会被手动强制开和关,造成误操作。(文章来源与于网络)
- 在线客服
- 服务热线
- 微信咨询
- 返回顶部