
一、基本介绍
快速简便启动工作单元是一种可在较短时间内实现自动化生产的智能系统。它基于发那科机器人接口功能,内置了机器人与加工中心的信号交互系统和人机交互界面,并为客户提供了一系列标准化模块,客户仅需提供夹具、机器人手抓和加工程序,就能进行自动化生产。
依据客户需求的不同,快速简便启动工作单元可分为两种形式,即重视生产效率的高生产性单元和柔性可移动的高灵活性单元,下面分别介绍两种工作单元。
(1)高生产性快速简便启动工作单元
高生产性快速简便启动工作单元由小型加工中心、伺服侧门及黄色机器人组成,如图 1 所示,其中,机器人的底座为固定式,通过附属钣金固定在小型加工中心的铸件上。该单元的结构节凑,重视加工节拍的提升,适用于节拍要求高、尺寸较小的量产零件。

图 1 高生产性快速简便启动工作单元
(2)高灵活性快速简便启动工作单元
高灵活性快速简便启动工作单元由小型加工中心、伺服前门及绿色协作机器人构成,如图2所示,其中,机器人的底座为移动式,可根据需要灵活地移动。该单元安全系数高,不需要加装工业围栏就能进行正常作业,适用于加工时间长、多种类小批量的零件加工。

图2 高灵活性快速简便启动工作单元
二、 快速简便启动工作单元的操作界面
为了帮助客户更好地使用快速简便启动工作单元,发那科公司在机器人接口2功能的基础上,在小型加工中心i HMI界面中开发了一系列人机交互画面,其中,在机器人界面下,主要设置了系统启动画面、周期监视器画面、程序设定画面、各种设定画面及机器人手动操作画面等,如图3 所示,下面分别介绍上述画面。

图3 ROBODRILL 机器人界面
(1)系统启动画面
在显示机器人界面的主画面时,将运行模式变更为MEM,可显示系统启动画面,如图4所示,在该画面中,客户能确认的信息如下:机器人与机床的运行程序;机床运行模式;上下料位置设置情况;机器人基准坐标设置情况;周边设备的状态等。
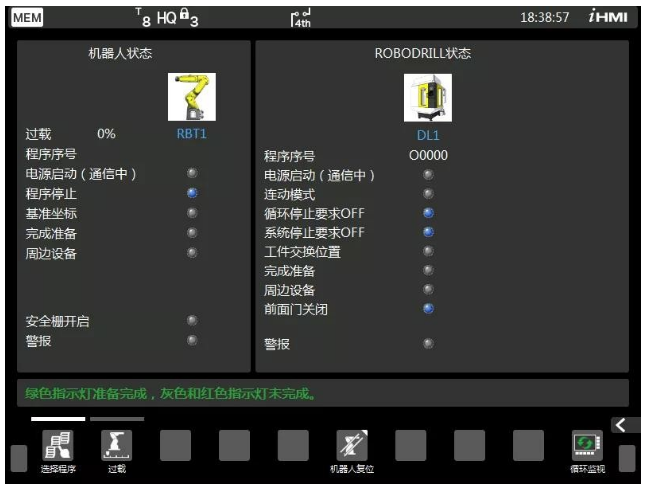
图4 系统启动画面
(2)周期监视器画面
在显示系统启动画面时,按【周期监视器】软键,可显示周期监视器画面,如图5所示,在该画面中,客户能进行的操作如下:机器人与小型加工中心信号状态的确认;启动或停止QSSR系统;机器人过载值设置;机器人复位操作。

图5 周期监视器画面
(3)程序设定画面
在显示机器人界面的主画面时,将运行模式变更为EDIT,可显示出程序设定画面,如图6所示,在该画面中,客户可分别设置配套的机器人程序和小型加工中心的程序,可将配套程序作为主程序来进行选取。

图6 程序设定画面
(4)各种设定画面
在机器人界面上,显示出纵向软键,按【各种设定】软键,可显示各种设定画面,如图7所示,在该画面中,客户可进行的设定如下:机器人类型设置;上下料位置设置;机器人连接的加工中心的数量设置;加工中心主从关系设置;上下料请求的条件设置等。

图7 各种设定画面
(5)机器人手动操作画面
在显示机器人界面的主画面时,将运行模式变更为HNDL,可显示机器人手动操作画面,如图8所示,在该画面中,客户可进行的操作如下:机器人轴移动;机器人手抓动作;基准原点返回;执行登陆程序等。

图8 机器人手动操作画面
三、 快速简便启动工作单元的运行设置
在快速简便启动工作单元搭建完成后,系统的运行设置可依据以下步骤:
1)在各种设定画面设置加工中心的主从关系、设置上下料位置坐标、机器人类型等;
2)在程序设定画面选择机器人与加工中心的运行程序;
3)在系统启动画面检查机器人与加工中心的即时状态,启动系统运行;
4)在周期监视器画面监测机器人与加工中心的运行情况;
5)机加工和上下料过程;
6)在周期监视器画面停止系统运行。

服务热线


